marp: true theme: default paginate: true _paginate: false header: '' footer: '' backgroundColor: white
第十二讲 同步与互斥
第一节 概述
向勇 陈渝 李国良 任炬
2025年秋季
提纲
1. 背景
- 现实生活中的同步互斥
- 临界区
- 同步互斥的方法
背景
-
独立进/线程
- 不和其他进/线程共享资源或状态
- 确定性 => 输入状态决定结果
- 可重现 => 能够重现起始条件
- 调度顺序不重要
-
进/线程如果有资源共享
- 存在不确定性
- 存在不可重现
- 可能出现难以重现的错误
背景
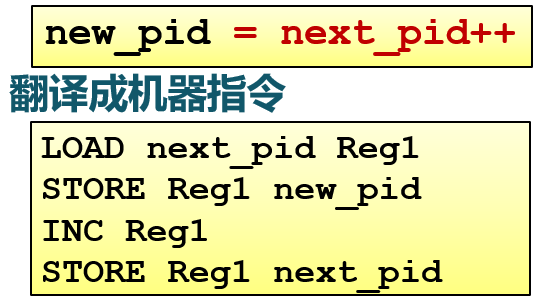
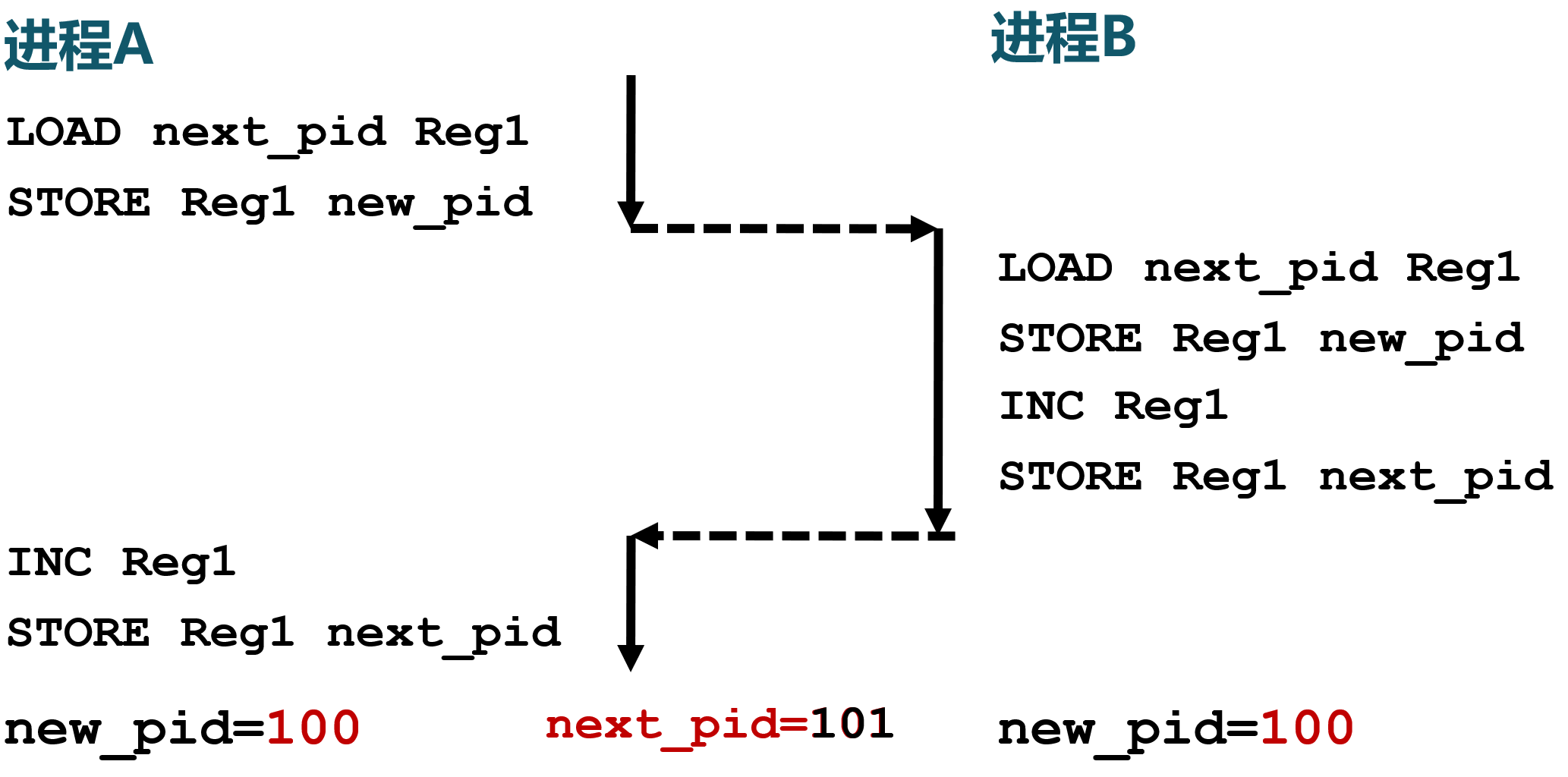
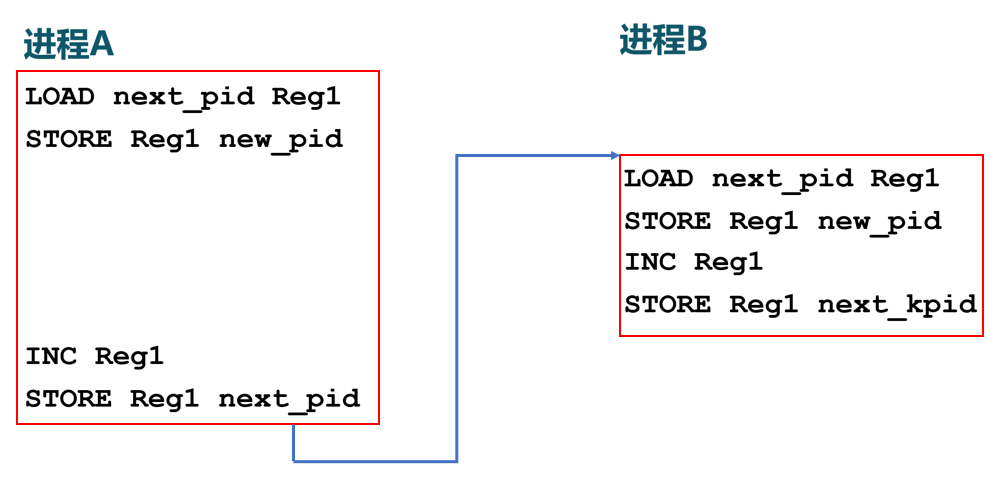
- 有资源共享的进/线程执行fork时的可能错误
原子操作(Atomic Operation)
- 原子操作是指一次不存在任何中断或失败的操作
- 要么操作成功完成
- 或者操作没有执行
- 不会出现部分执行的状态
操作系统需要利用同步机制在并发执行的同时,保证一些操作是原子操作
提纲
- 背景
2. 现实生活中的同步互斥
- 临界区
- 同步互斥的方法
现实生活中的同步互斥
例如: 家庭采购协调 (利用现实生活问题帮助理解操作系统同步问题)
- 注意,计算机与人的差异
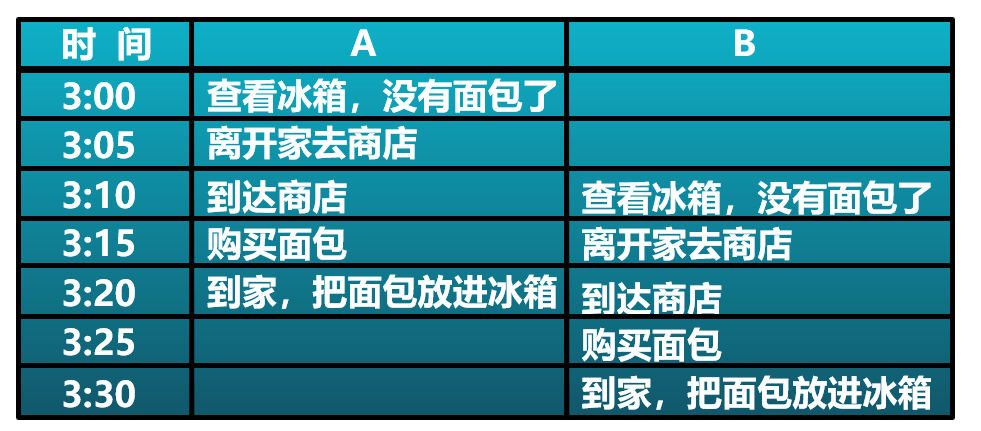
现实生活中的同步互斥
- 如何保证家庭采购协调的成功和高效
- 需要采购时,有人去买面包
- 最多只有一个人去买面包
- 可能的解决方法
- 在冰箱上设置一个锁和钥匙( lock&key)
- 去买面包之前锁住冰箱并且拿走钥匙
- 加锁导致的新问题
- 冰箱中还有其他食品时,别人无法取到

- 冰箱中还有其他食品时,别人无法取到
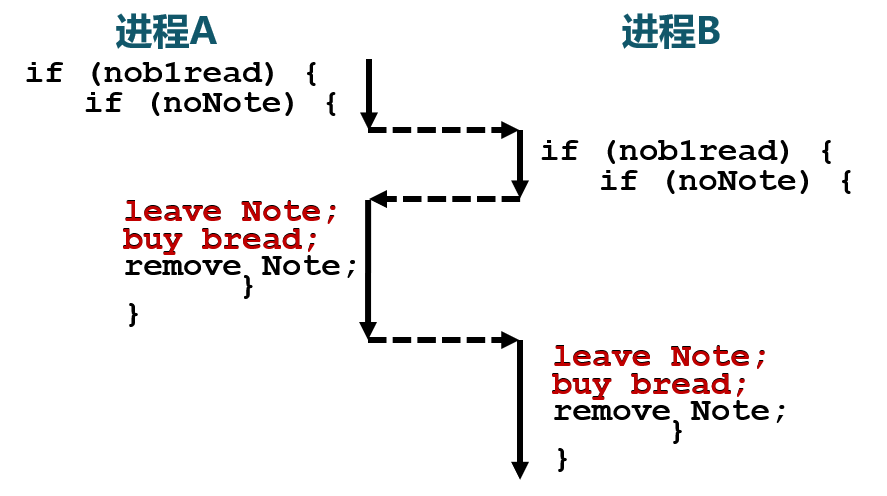
方案一:先检查,后留便签
- 使用便签来避免购买太多面包
- 购买之前留下一张便签
- 买完后移除该便签
- 别人看到便签时,就不去购买面包
if (nobread) {
if (noNote) {
leave Note;
buy bread;
remove Note;
}
}
方案一的分析
-
偶尔会购买太多面包 - 重复
- 检查面包和便签后帖便签前,有其他人检查面包和便签
-
解决方案只是间歇性地失败
- 问题难以调试
- 必须考虑调度器所做事情
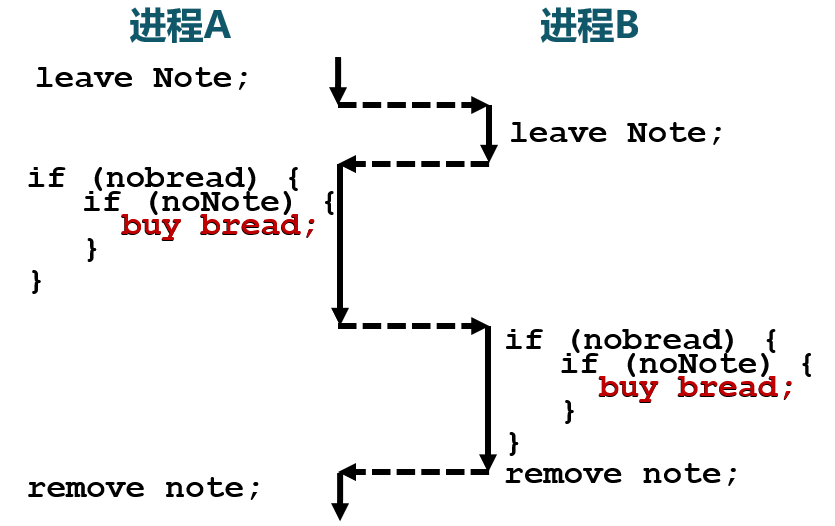
方案二:先留便签,后检查
- 先留便签,后查面包和便签
leave Note;
if (nobread) {
if (noNote) {
buy bread;
}
}
remove note;
- 会发生什么?
- 不会有人买面包
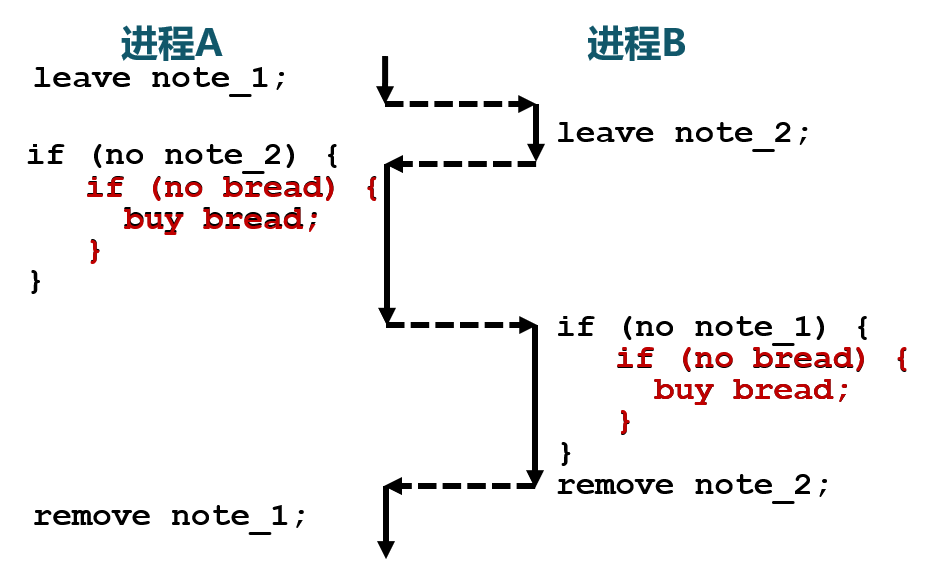
方案三:先留不同便签,后检查
- 为便签增加标记,以区别不同人的便签
- 现在可在检查之前留便签
// 进程A
leave note_2;
if (no note_1) {
if (no bread) {
buy bread;
}
}
remove note_2;
方案三:先留不同便签,后检查
- 为便签增加标记,以区别不同人的便签
- 现在可在检查之前留便签
// 进程B
leave note_1;
if (no note_2) {
if (no bread) {
buy bread;
}
}
remove note_1;
方案三
- 为便签增加标记,以区别不同人的便签
- 现在可在检查之前留便签
- 会发生什么?
- 可能导致没有人去买面包
- 每个人都认为另外一个去买面包
方案四:采用不同流程
两个人采用不同的处理流程
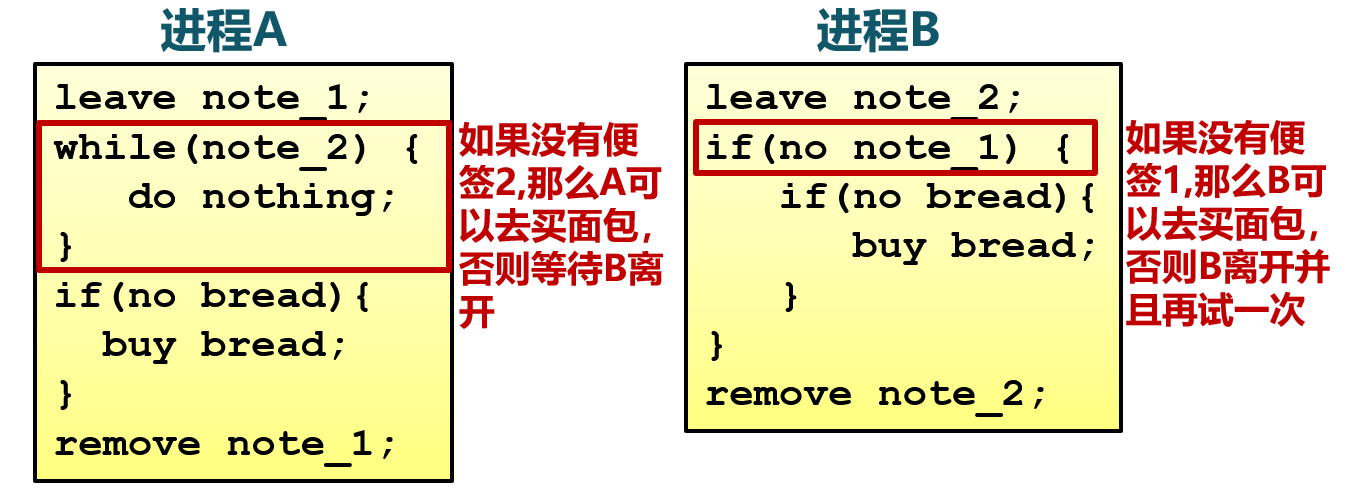
方案四
两个人采用不同的处理流程
- 现在有效吗?
- 它有效,但太复杂
- A和B的代码不同
- 如果线程更多,怎么办?
- 当A等待时,不能做其他事
- 忙等待(busy-waiting)
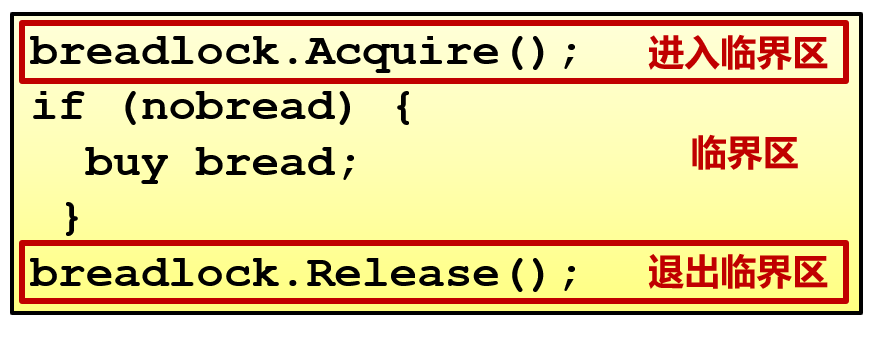
方案五:采用原子操作
- 利用两个原子操作实现一个锁(lock)
- Lock.Acquire()
- 在锁被释放前一直等待,然后获得锁
- 如果两个线程都在等待同一个锁,并且同时发现锁被释放了,那么只有一个能够获得锁
- Lock.Release()
- 解锁并唤醒任何等待中的线程
- Lock.Acquire()
提纲
- 背景
- 现实生活中的同步互斥
3. 临界区
- 同步互斥的方法
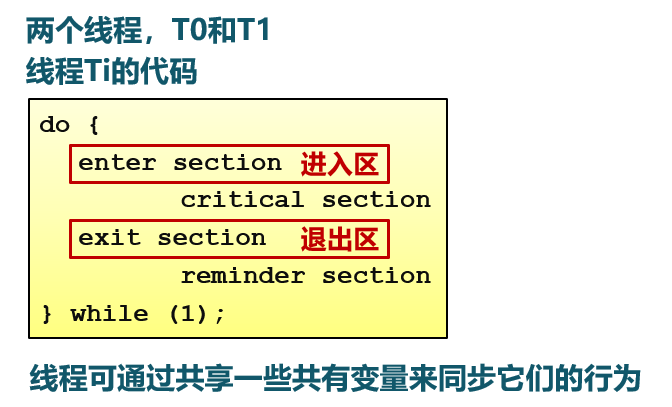
临界区(Critical Section)
entry section
critical section
exit section
remainder section
- 进入区(entry section)
- 检查可否进入临界区的一段代码
- 如可进入,设置相应"正在访问临界区"标志
- 临界区(critical section)
- 线程中访问临界资源的一段需要互斥执行的代码
临界区(Critical Section)
entry section
critical section
exit section
remainder section
- 退出区(exit section)
- 清除“正在访问临界区”标志
- 剩余区(remainder section)
- 代码中的其余部分
临界区访问规则
entry section
critical section
exit section
remainder section
- 空闲则入:没有线程在临界区时,任何线程可进入
- 忙则等待:有线程在临界区时,其他线程均不能进入临界区
- 有限等待:等待进入临界区的线程不能无限期等待
- 让权等待(可选):不能进入临界区的线程,应释放CPU(如转换到阻塞状态)
提纲
- 背景
- 现实生活中的同步互斥
- 临界区
4. 同步互斥的方法
4.1 禁用硬件中断
4.2 基于软件的解决方法 4.3 更高级的抽象方法
禁用硬件中断
- 没有中断,没有上下文切换,因此没有并发
-
硬件将中断处理延迟到中断被启用之后
-
现代计算机体系结构都提供指令来实现禁用中断
local_irq_save(unsigned long flags); critical section local_irq_restore(unsigned long flags);
-
- 进入临界区:禁止所有中断,并保存标志
- 离开临界区:使能所有中断,并恢复标志
禁用硬件中断
- 缺点
- 禁用中断后,线程无法被停止
- 整个系统都会为此停下来
- 可能导致其他线程处于饥饿状态
- 临界区可能很长
- 无法确定响应中断所需的时间(可能存在硬件影响)
- 不适合多核
- 禁用中断后,线程无法被停止
- 要小心使用
提纲
- 背景
- 现实生活中的同步互斥
- 临界区
- 同步互斥的方法
基于软件的解决方法
尝试一:根据turn值进入临界区
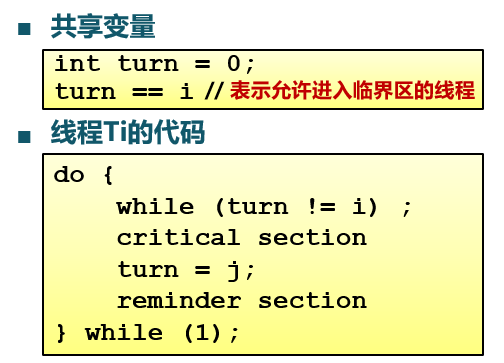
- 满足“忙则等待”,但是有时不满足“空闲则入”
// 线程 Tj
do {
while (turn != j) ;
critical section
turn = i;
remainder section
} while(1)
尝试一:根据turn值进入临界区
- 满足“忙则等待”,但是有时不满足“空闲则入”
- Ti不在临界区,Tj想要继续运行,但是必须等待Ti进入过临界区后
- turn = 0;
- T0 不需要访问临界区
- T1 需要访问,但没有轮到,只能一直等待
尝试二:根据flag进入临界区
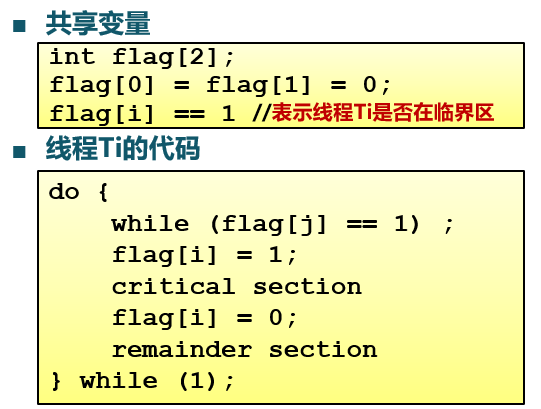
- 互相依赖(线程忙等)
- 不满足“忙则等待”
- flag[i]=flag[j]=0
// 线程 Tj
do {
while (flag[i] == 1) ;
flag[j] = 1;
critical section
flag[j] = 0;
remainder section
} while(1)
尝试三:根据flag进入临界区
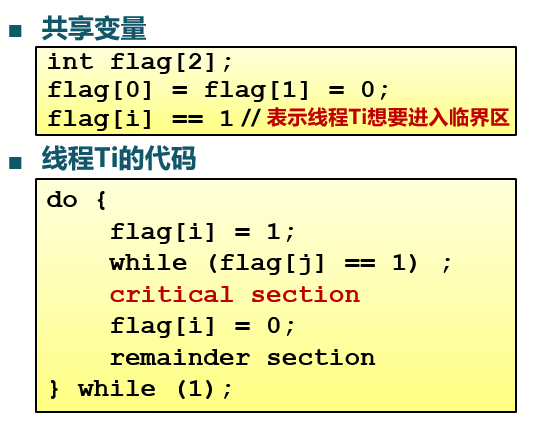
- 满足“忙则等待”,但是不满足“空闲则入”
- flag[i]=flag[j]=1
// 线程 Tj
do {
flag[j] = 1;
while (flag[i] == 1) ;
critical section
flag[j] = 0;
remainder section
} while(1)
Peterson算法 turn+flag
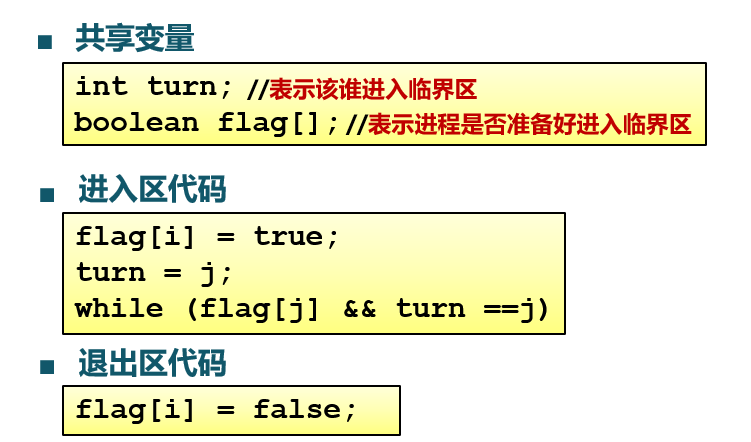
- 满足线程Ti和Tj之间互斥的经典的基于软件的解决方法(1981年)
- 孔融让梨
- 主动声明意图(flag变量)
- 礼貌谦让(turn变量)
- 安全检查(循环验证)
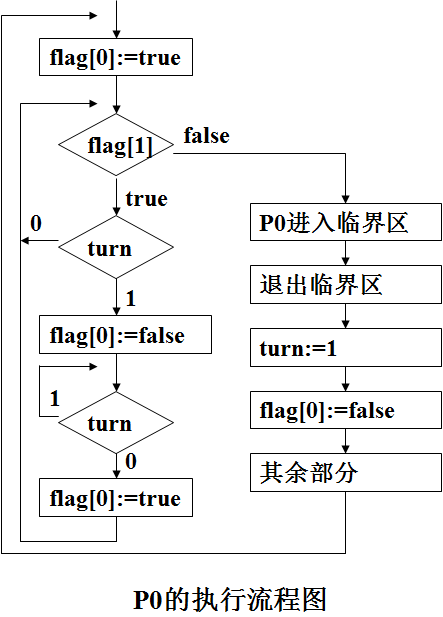
Peterson算法 turn+flag
// 共享变量
let mut flag = [false; N]; // 标识进程是否请求进入临界区
let mut turn = 0; // 记录应该让哪个进程进入临界区
// 进程P0
while (true) {
flag[0] = true;
turn = 1;
while (flag[1] == true && turn == 1) ;
// 进入临界区执行任务
// 退出临界区
flag[0] = false;
}
// 进程P1
while (true) {
flag[1] = true;
turn = 0;
while (flag[0] == true && turn == 0) ;
// 进入临界区执行任务
// 退出临界区
flag[1] = false;
}
Peterson算法 turn+flag
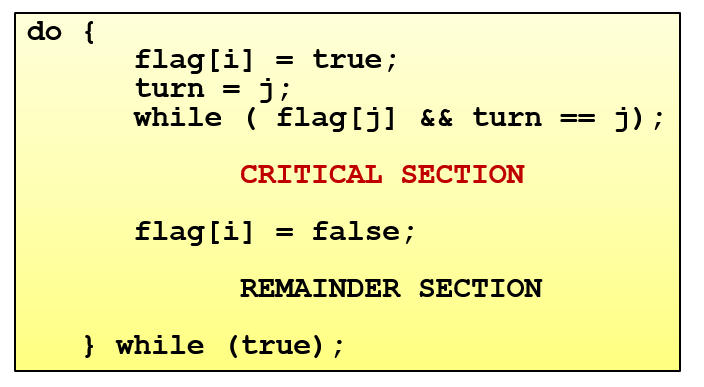
//进程Pi
flag[i] = True;
turn = j;
while(flag[j] && turn == j);
critical section;
flag[i] = False;
remainder section;
//进程Pj
flag[j] = True;
turn = i;
while(flag[i] && turn == i);
critical section;
flag[j] = False;
remainder section;
Dekkers算法
声明阶段:举起flag标志牌声明意图
竞争阶段:若对方在竞争,根据turn退让
释放阶段:使用完资源后切换turn,保公平
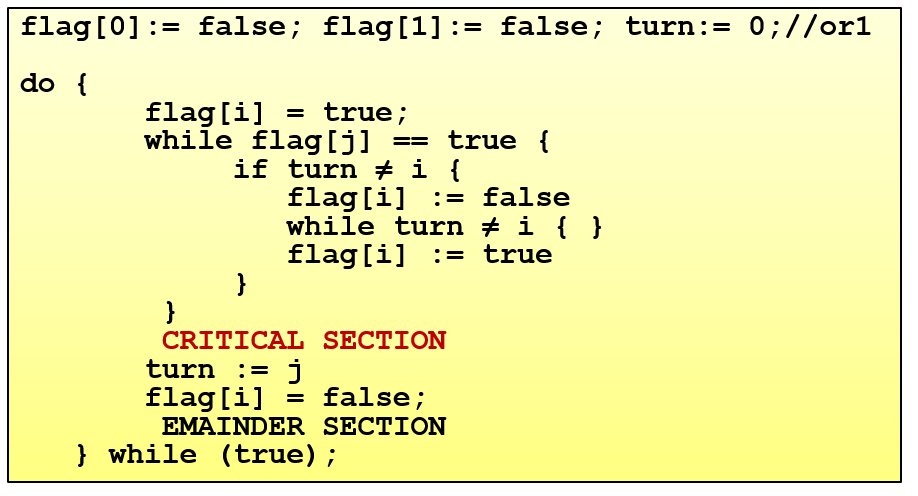
do{
flag[0] = true;// 首先P0举手示意我要访问
while(flag[1]) {// 看看P1是否也举手了
if(turn==1){// 如果P1也举手了,那么就看看到底轮到谁
flag[0]=false;// 如果确实轮到P1,那么P0先把手放下(让P1先)
while(turn==1);// 只要还是P1的时间,P0就不举手,一直等
flag[0]=true;// 等到P1用完了(轮到P0了),P0再举手
}
}
critical section;// 访问临界区
turn = 1;// P0访问完了,把轮次交给P1,让P1可以访问
flag[0]=false;// P0放下手
remainder section;
} while(true);
Dekkers算法
 vs
vs 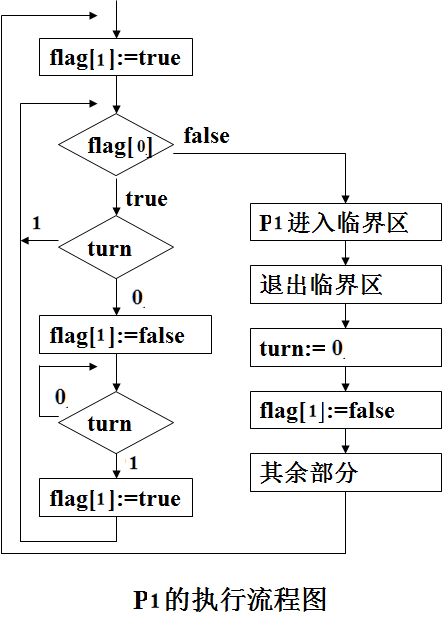
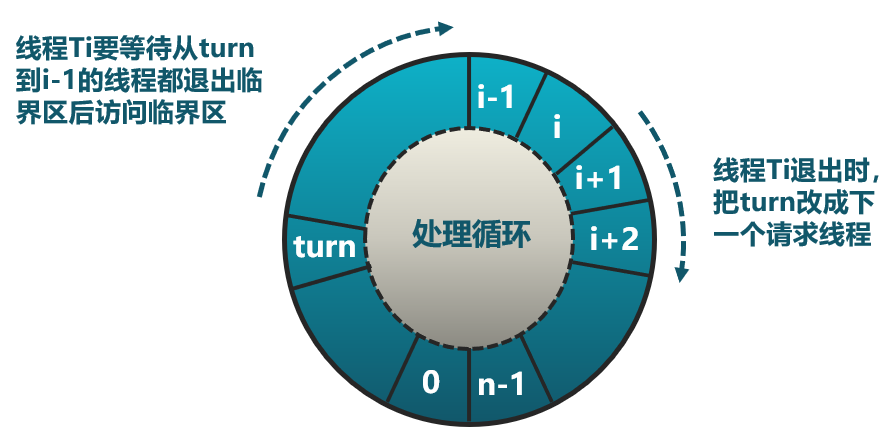
N线程
Eisenberg和McGuire
- 一个共享的turn变量,若干线程排成一个环
- 每个环有个flag标志,想要进入临界区填写flag标志
- 有多个想进入临界区,从前往后走,执行完一个线程,turn改为下一个线程的值。
N线程 - 初始化
INITIALIZATION:
enum states flags[n -1]; //{IDLE, WAITING, ACTIVE}
int turn;
for (index=0; index<n; index++) {
flags[index] = IDLE;
}
N线程 - 进入临界区
ENTRY PROTOCOL (for Process i ):
repeat {//从turn到i是否存在请求进程:若存在,则不断循环,直至不存在这样的进程,将当前进程标记为ACTIVE
flags[i] = WAITING;//表明自己需要资源
index = turn;//轮到谁了
while (index != i) {//从turn到i轮流找不idle的线程
if (flag[index] != IDLE) index = turn;//turn到i有非idle的阻塞
else index = (index+1) mod n; //否则轮到i,并跳出
}
flags[i] = ACTIVE;//Pi active; 其他线程有可能active
//对所有ACTIVE的进程做进一步的判断,判断除了当前进程以外,是否还存在其他ACTIVE的进程
index = 0;//看看是否还有其他active的
while ((index < n) && ((index == i) || (flags[index] != ACTIVE))) {
index = index+1;
}//如果后面没有active了,并且轮到Pi或者turn idle, 就轮到i;否则继续循环
} until ((index >= n) && ((turn == i) || (flags[turn] == IDLE)));
turn = i;//获得turn并处理
N线程 - 离开临界区
EXIT PROTOCOL (for Process i ):
index = turn+1 mod n;//找到一个不idle的
while (flags[index] == IDLE) {
index = index+1 mod n;
}
turn = index;//找到不idle的设置为turn;或者设置为自己
flag[i] = IDLE;//结束,自己变idle
提纲
- 背景
- 现实生活中的同步互斥
- 临界区
- 同步互斥的方法
4.1 禁用硬件中断 4.2 基于软件的解决方法
4.3 更高级的抽象方法
方法3:更高级的抽象方法
-
基于软件的解决方法
- 复杂,需要忙等待
-
更高级的抽象方法
- 硬件提供了一些同步原语
- 中断禁用,原子操作指令等
- 操作系统提供更高级的编程抽象来简化线程同步
- 例如:锁、信号量
- 用硬件原语来构建
- 硬件提供了一些同步原语
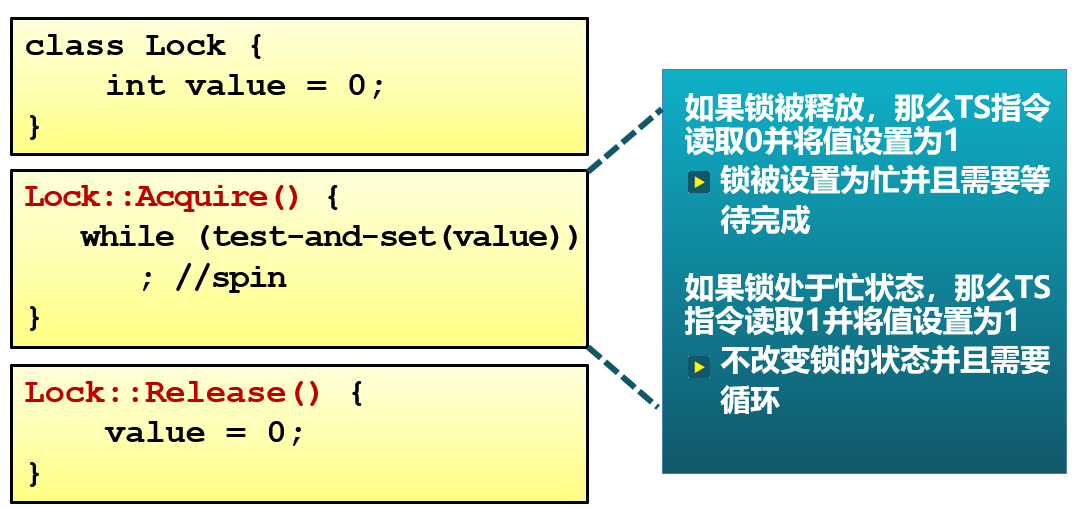
锁(lock)
- 锁是一个抽象的数据结构
- 一个二进制变量(锁定/解锁)
- 使用锁来控制临界区访问
- Lock::Acquire()
- 锁被释放前一直等待,后得到锁
- Lock::Release()
- 释放锁,唤醒任何等待的线程
- 释放锁,唤醒任何等待的线程
锁(lock)
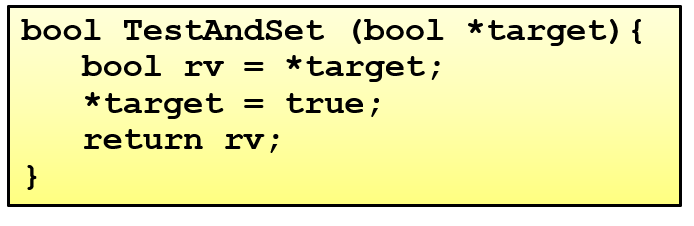
现代CPU提供一些特殊的原子操作指令
- 原子操作指令
- 测试和置位(Test-and-Set )指令
- 从内存单元中读取值
- 测试该值是否为1(然后返回真或假)
- 内存单元值设置为1
- 输入0,改成1,返回0;
- 输入1,保持1,返回1;
- 测试和置位(Test-and-Set )指令
锁(lock)
现代CPU都提供一些特殊的原子操作指令
do {
while(TestAndSet(&lock)) ;
critical section;
lock = false;
remainder section;
} while (true)
锁(lock)
现代CPU都提供一些特殊的原子操作指令
do {
while(TestAndSet(&lock)) ;
critical section;
lock = false;
remainder section;
} while (true)
lock(): while(TestAndSet(&lock));
critical section;
unlock(): lock=false;
锁(lock)
- 原子操作:交换指令CaS(Compare and Swap)
bool compare_and_swap(int *value, int old, int new) {
if(*value==old) {
*value = new;
return true; }
return false;
}
int lock = 0; // 初始时锁空闲
while(!compare_and_swap(&lock,0,1)); // lock 加锁
critical section;
lock=0; // unlock 解锁
remainder section;
锁(lock)
- 原子操作:交换指令CaS(Compare and Swap)
- ABA 问题:
- value= 100;
- Thread1: value - 50; //成功 value=50
- Thread2: value - 50; //阻塞
- Thread3: value + 50; //成功 value=100
- Thread2: 重试成功
- 解决思路:加上版本号(时间戳)
- (100,1); (50,2); (100,3)
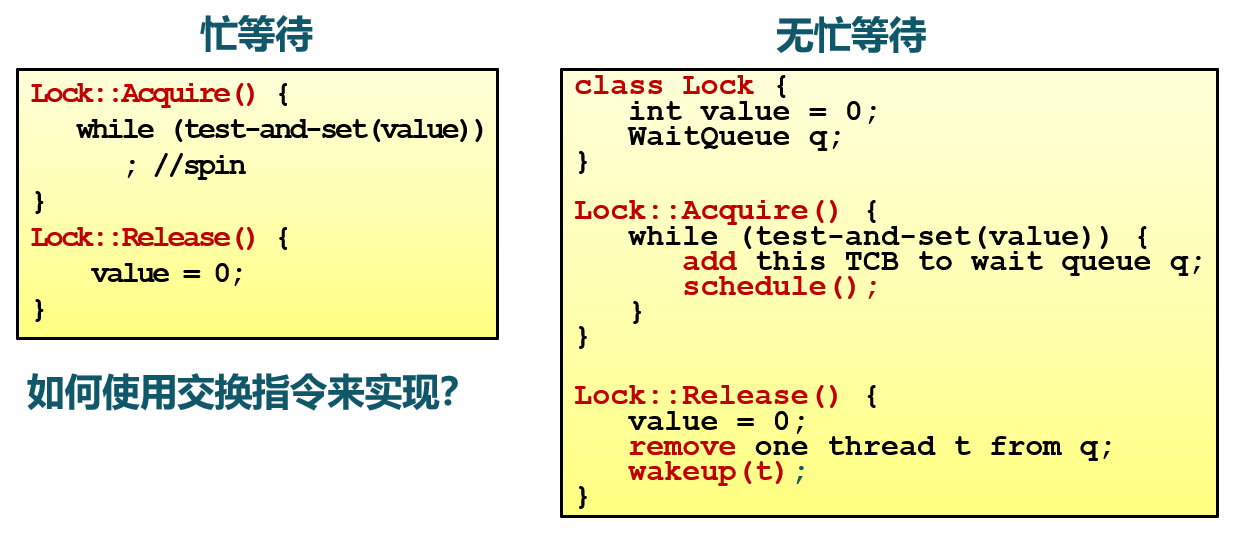
锁(lock)
使用TaS指令实现自旋锁(spinlock)
- 线程在等待的时候消耗CPU时间
锁(lock)
忙等锁 v.s. 等待锁
锁(lock)
- 优点
- 适用于单处理器或者共享主存的多处理器中任意数量的线程同步
- 简单并且容易证明
- 支持多临界区
- 缺点
- 忙等待消耗处理器时间
- 可能导致饥饿
- 线程离开临界区时有多个等待线程的情况
- 可能死锁:线程间相互等待,无法继续执行
小结
- 常用的三种同步实现方法
- 禁用中断(仅限于单处理器)
- 软件方法(复杂)
- 锁是一种高级的同步抽象方法
- 硬件原子操作指令(单处理器或多处理器均可)
- 互斥可以使用锁来实现