marp: true theme: default paginate: true _paginate: false header: '' footer: '' backgroundColor: white
第七讲 进程管理与单处理器调度
第三节 实时调度
向勇 陈渝 李国良 任炬
2025年秋季
问题
- 调度算法有可能保存任务一定在截止时间前完成吗?
- 如果不能在截止时间前完成,将导致严重后果
提纲
1. 实时操作系统
- 实时调度
- 优先级反置
- 实时操作系统的定义
- 实时任务
实时操作系统的定义
- 实时操作系统的定义
- 正确性依赖于其时间和功能两方面的操作系统
- 实时操作系统的性能指标
- 时间约束的及时性(deadlines)
- 速度和平均性能相对不重要
- 实时操作系统的特性
- 时间约束的可预测性
实时操作系统分类
- 强/硬实时操作系统
- 要求在指定的时间内必须完成重要的任务
- 弱/软实时操作系统
- 重要进程有高优先级,要求尽量但非必须完成
实时任务
- 任务(工作单元)
- 一次计算,一次文件读取,一次信息传递等等
- 任务属性
- 完成任务所需要的资源
- 定时参数
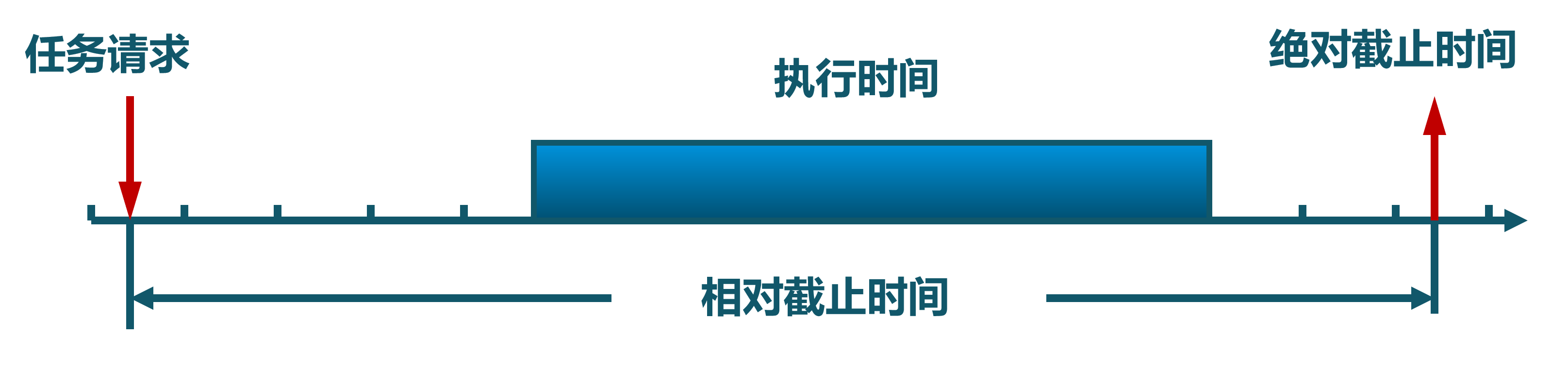
周期实时任务
- 周期实时任务:一系列相似的任务
- 任务有规律地重复
- 周期p = 任务请求时间间隔 (0 <p)
- 执行时间e = 最大执行时间(0 < e < p)
- 使用率U = e/p

- 可调度:if $\sum_{i} \frac{e_i}{p_i}\leq 1$; otherwise 不可调度
软时限和硬时限
- 硬时限(Hard deadline)
- 错过任务时限会导致灾难性或非常严重的后果
- 必须验证,在最坏情况下能够满足时限
- 软时限(Soft deadline)
- 通常能满足任务时限
- 如有时不能满足,则降低要求
- 尽力保证满足任务时限
可调度性
- 可调度表示一个实时操作系统能够满足任务时限要求
- 需要确定实时任务的执行顺序
- 静态优先级调度:任务执行过程中不会改变任务的优先级
- 动态优先级调度:任务执行过程中会改变任务的优先级
提纲
- 速率单调调度算法
- 最早截止时间优先算法
- 最低松弛度优先算法
实时调度
-
静态优先级调度:速率单调调度算法(RM, Rate Monotonic)
- 通过周期安排优先级
- 周期越短优先级越高
- 执行周期最短的任务
-
动态优先级调度:最早截止时间优先算法 (EDF, Earliest Deadline First)
- 截止时间越早优先级越高
- 执行离截止时间最近的任务
如果任务间有共享资源占用的情况,高优先级任务可能会被延误执行!
速率单调调度算法(RM, Rate Monotonic)
- 根据任务周期来确定任务优先级(周期越短优先级越高,抢占式)
- 进程P1:e=20 p=50
- 进程P2:e=35 p=100

速率单调调度算法(RM, Rate Monotonic)
- 根据任务周期来确定任务优先级(周期越短优先级越高,抢占式)
- 进程P1:e=25 p=50
- 进程P2:e=35 p=80

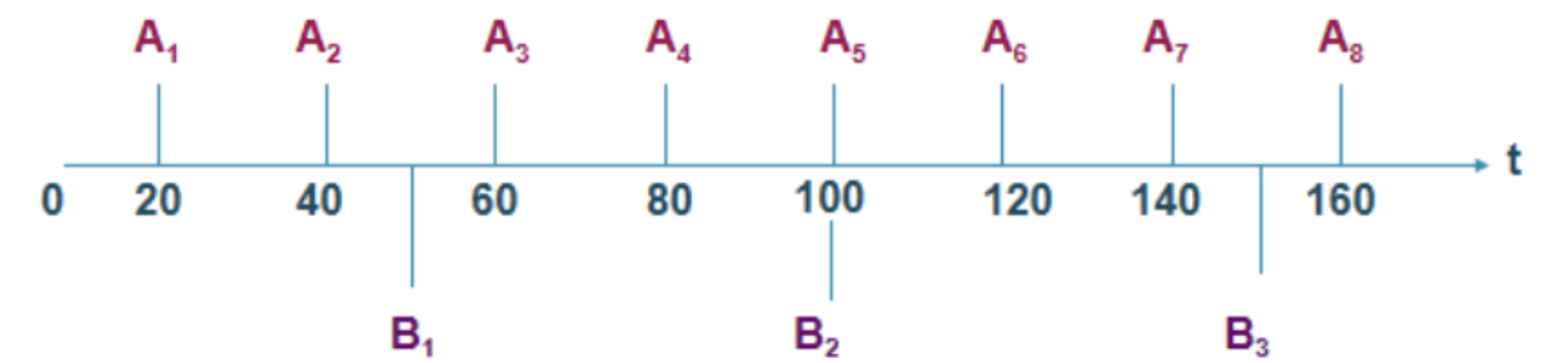
最早截止时间优先算法 (EDF, Earliest Deadline First)
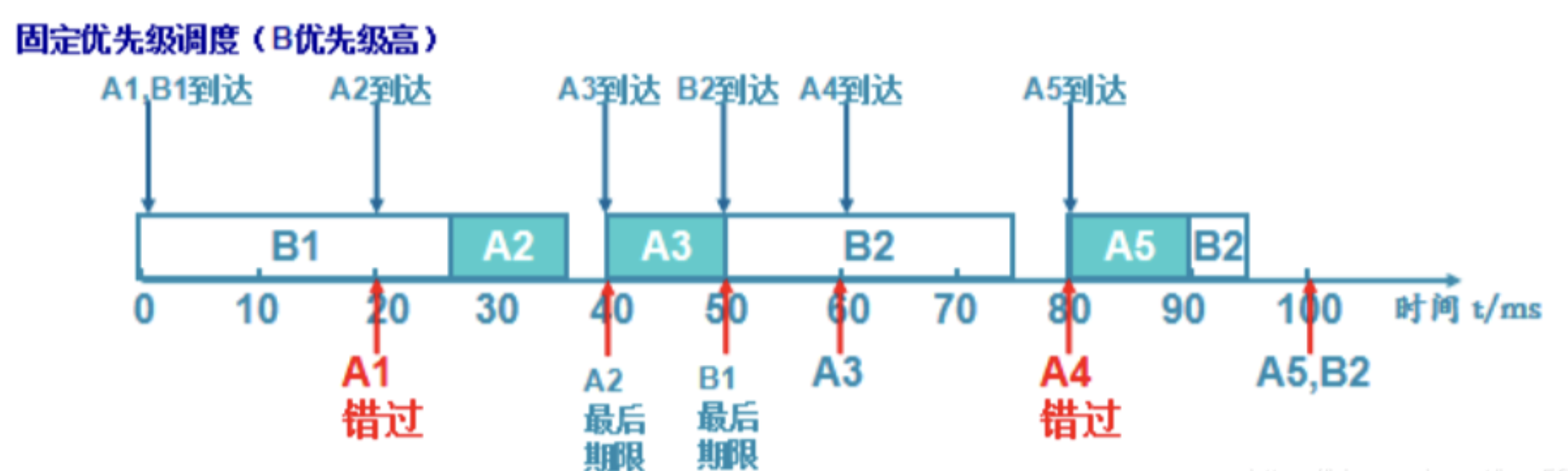
- 固定优先级的问题:有的任务可能错过期限
- 进程P1:e=10 p=20
- 进程P2:e=25 p=50
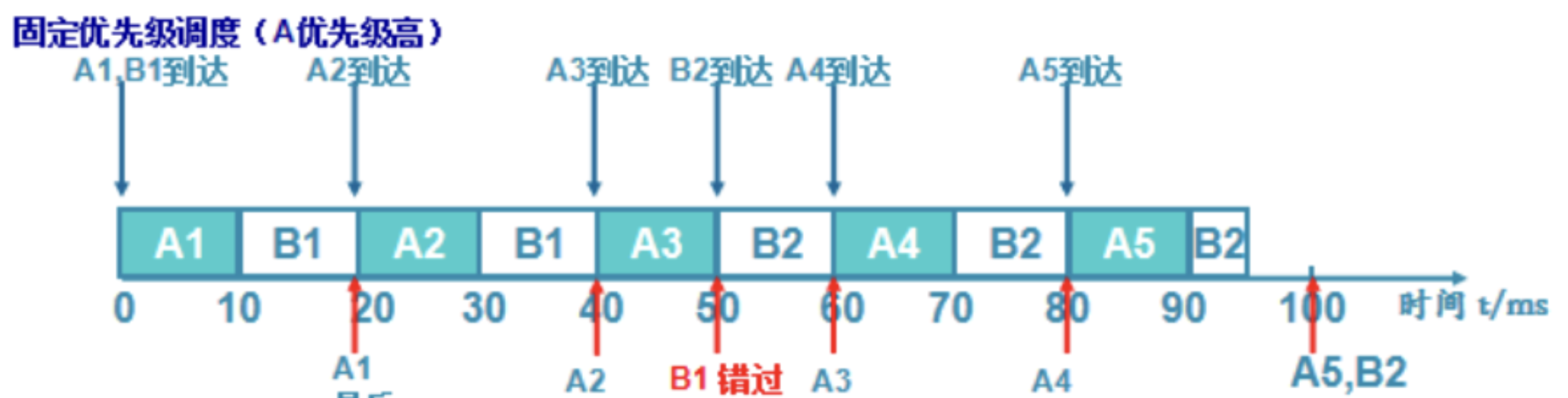
最早截止时间优先算法 (EDF, Earliest Deadline First)
- 固定优先级的问题:有的任务可能错过期限
- 进程P1:e=10 p=20
- 进程P2:e=25 p=50
最早截止时间优先算法 (EDF, Earliest Deadline First)
- 固定优先级的问题:有的任务可能错过期限
- 进程P1:e=10 p=20
- 进程P2:e=25 p=50
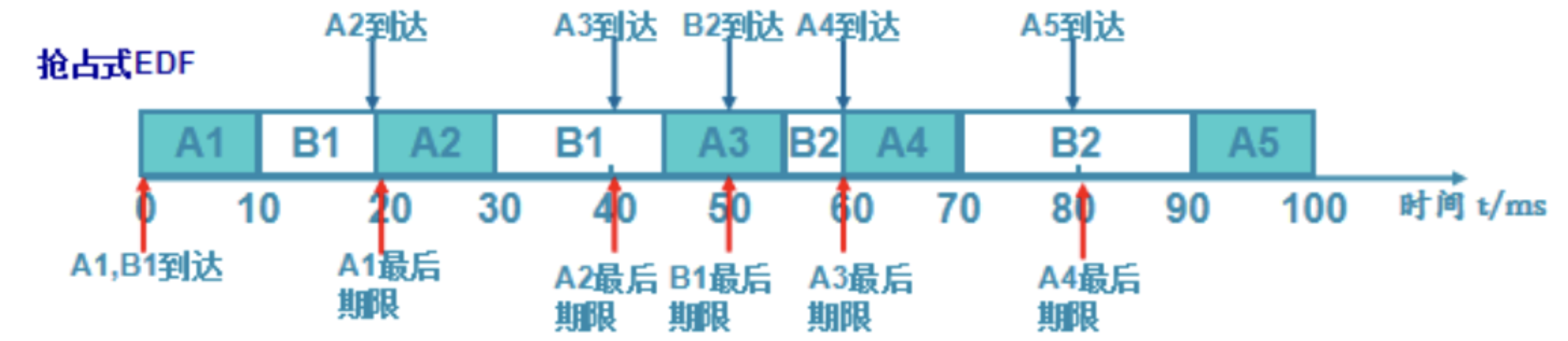
最早截止时间优先算法 (EDF, Earliest Deadline First)
- 任务的优先级根据任务的截止时间动态分配。截止时间越短,优先级越高。
- 进程P1:e=10 p=20
- 进程P2:e=25 p=50
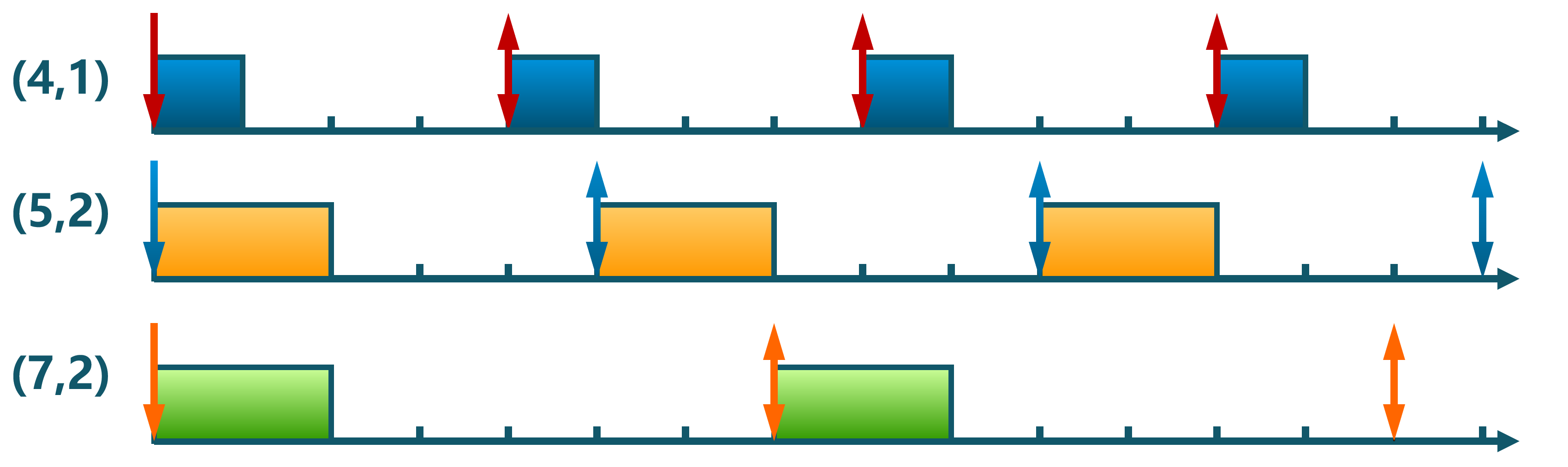
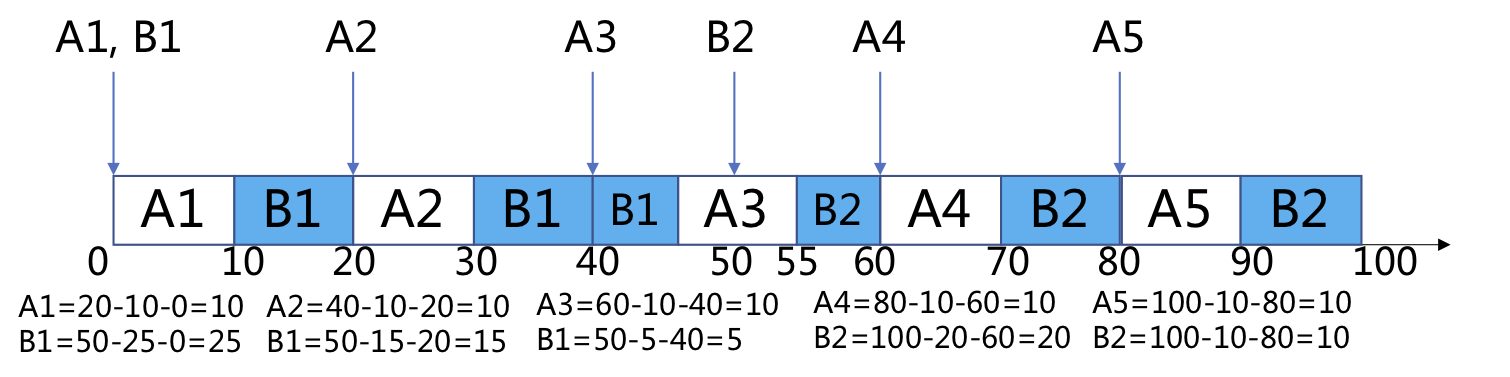
最低松弛度优先算法(LLF)
- 根据任务紧急或者松弛程度,来确定任务优先级
- 任务紧急度越高,优先级越高
- 松弛度=必须完成时间-本身还需要运行时间-当前时间
- 进程P1:e=10 p=20
- 进程P2:e=25 p=50
提纲
- 实时操作系统
- 实时调度
3. 优先级反置
- 优先级继承
- 优先级天花板协议
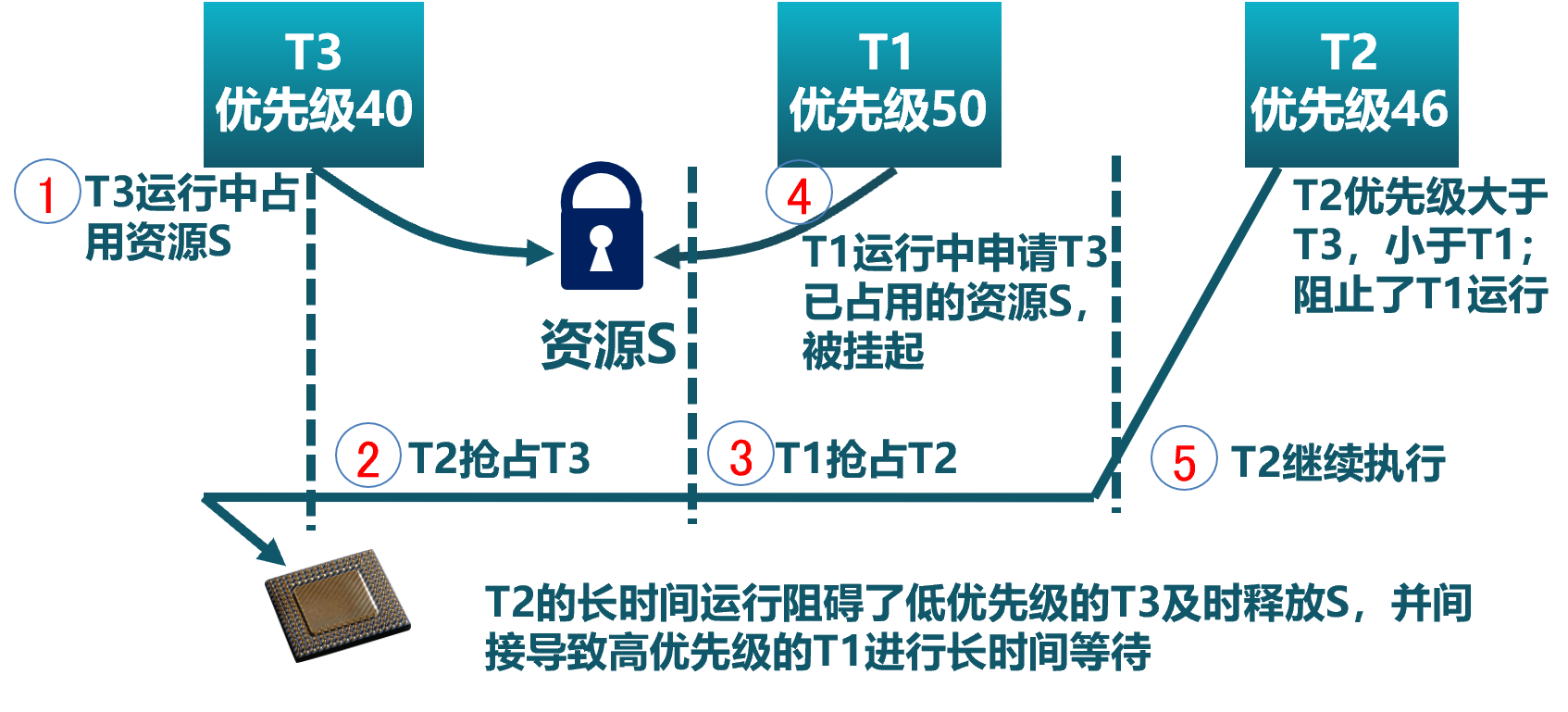
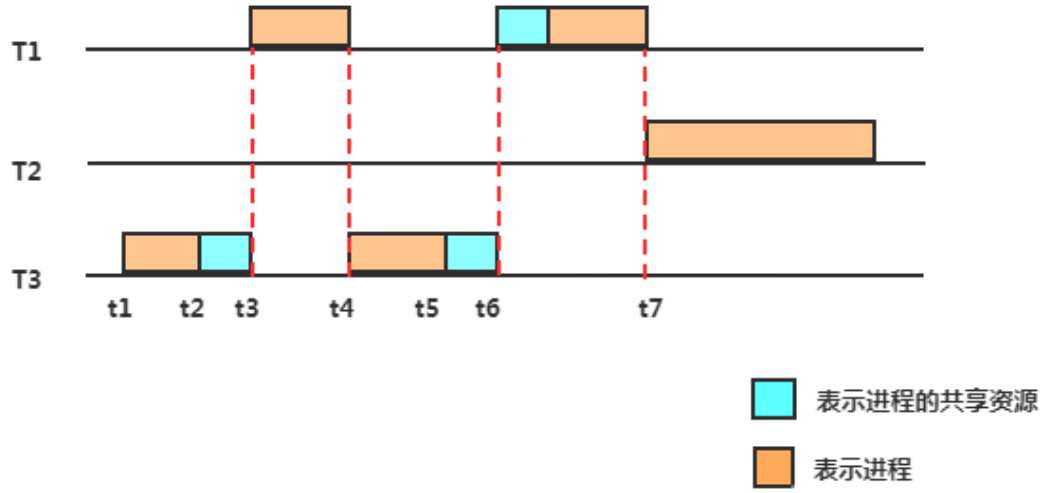
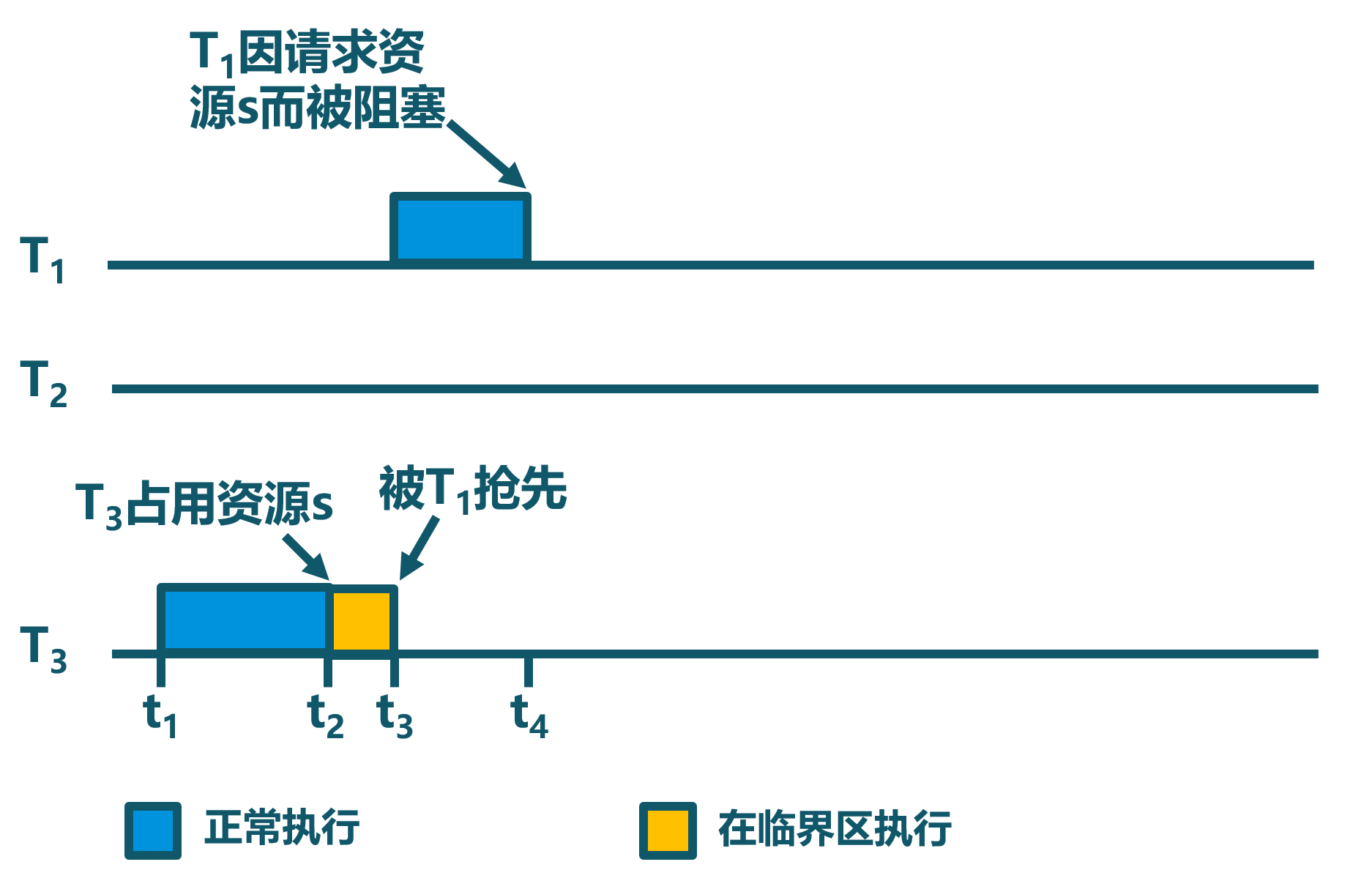
优先级反置(Priority Inversion)
高优先级进程长时间等待低优先级进程所占用资源的现象
- 基于优先级的可抢占调度算法存在优先级反置问题
优先级:T1>T2>T3
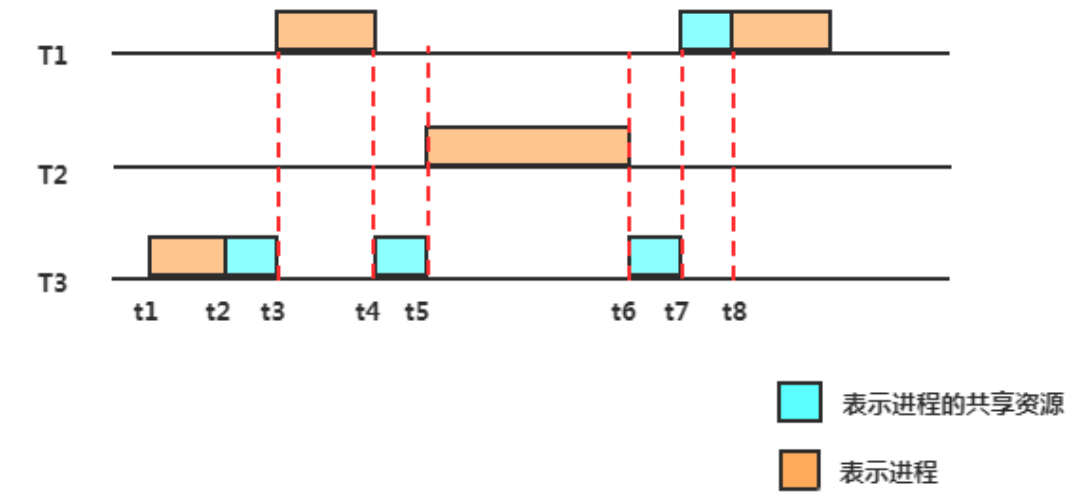
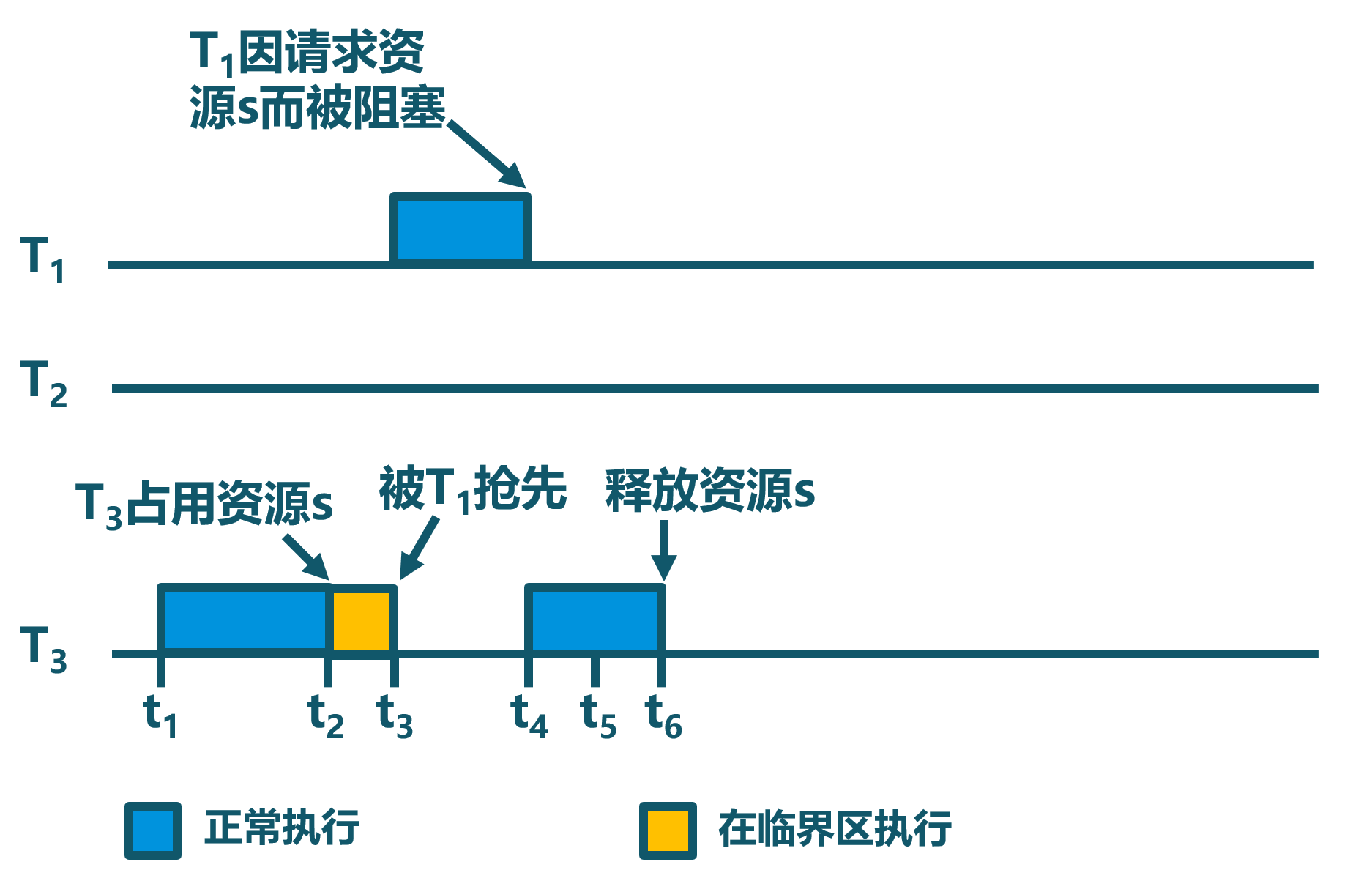
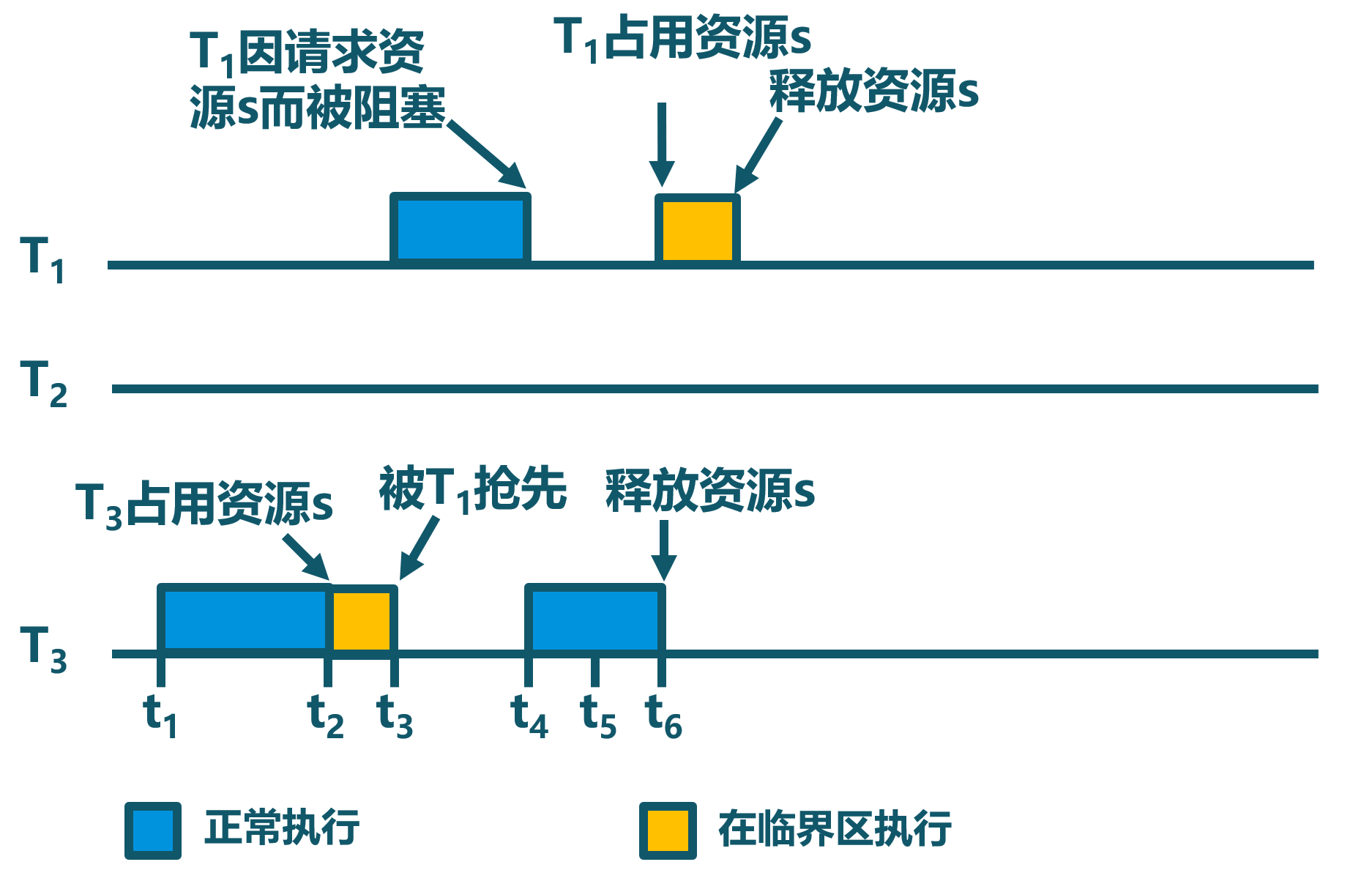
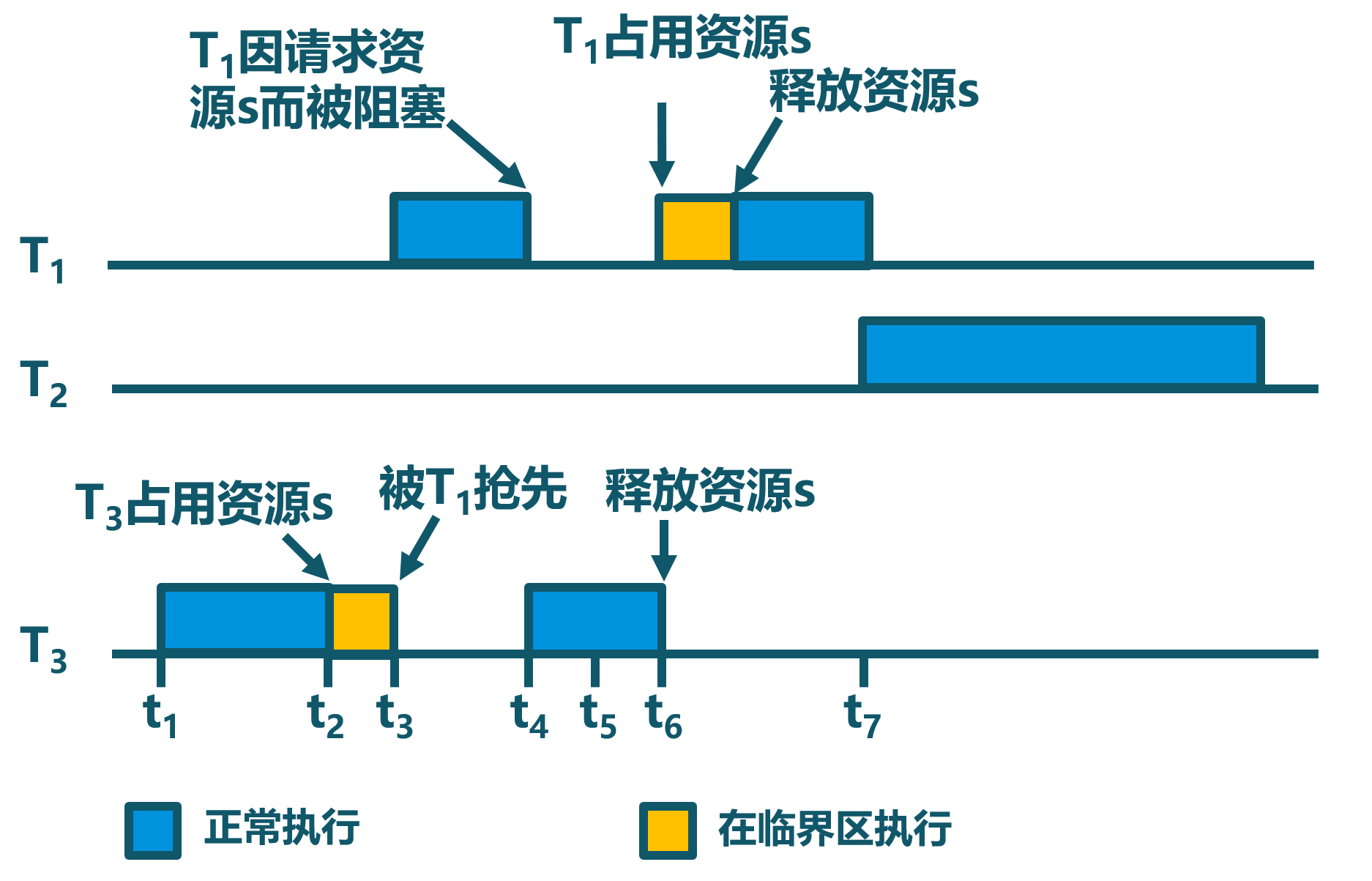
优先级反置(Priority Inversion)
高优先级进程长时间等待低优先级进程所占用资源的现象
- 基于优先级的可抢占调度算法存在优先级反置问题
优先级:T1>T2>T3
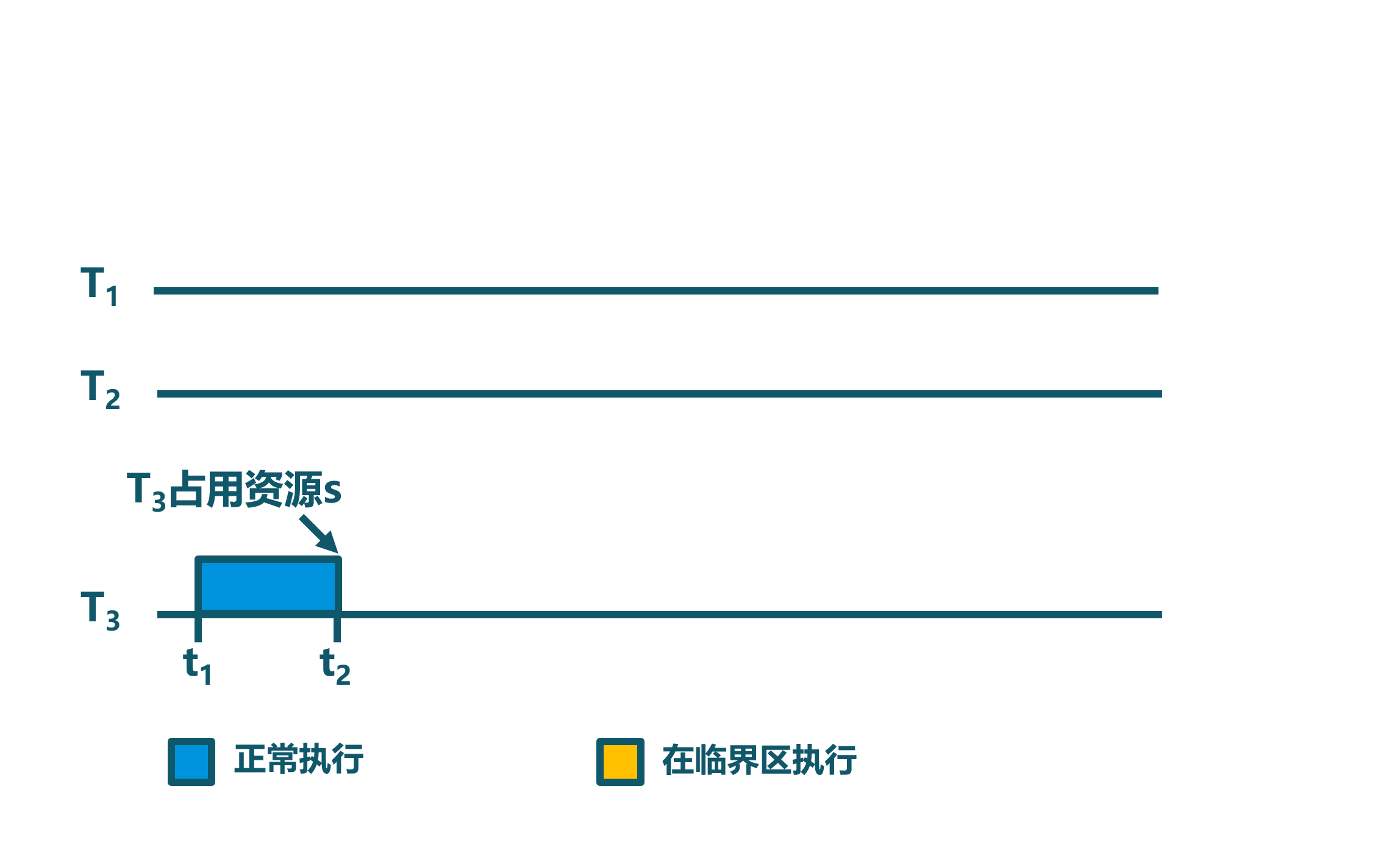
优先级继承(Priority Inheritance)
- 占用资源的低优先级进程继承申请资源的高优先级进程的优先级
- 只在想占有资源的高优先级进程被阻塞时,才提高占有资源的低优先级进程的优先级。
- 注:临界区:互斥访问共享资源的代码片段
- 注:临界区:互斥访问共享资源的代码片段
优先级继承(Priority Inheritance)
- 占用资源的低优先级进程继承申请资源的高优先级进程的优先级
- 只在想占有资源的高优先级进程被阻塞时,才提高占有资源的低优先级进程的优先级。注:临界区:互斥访问共享资源的代码片段
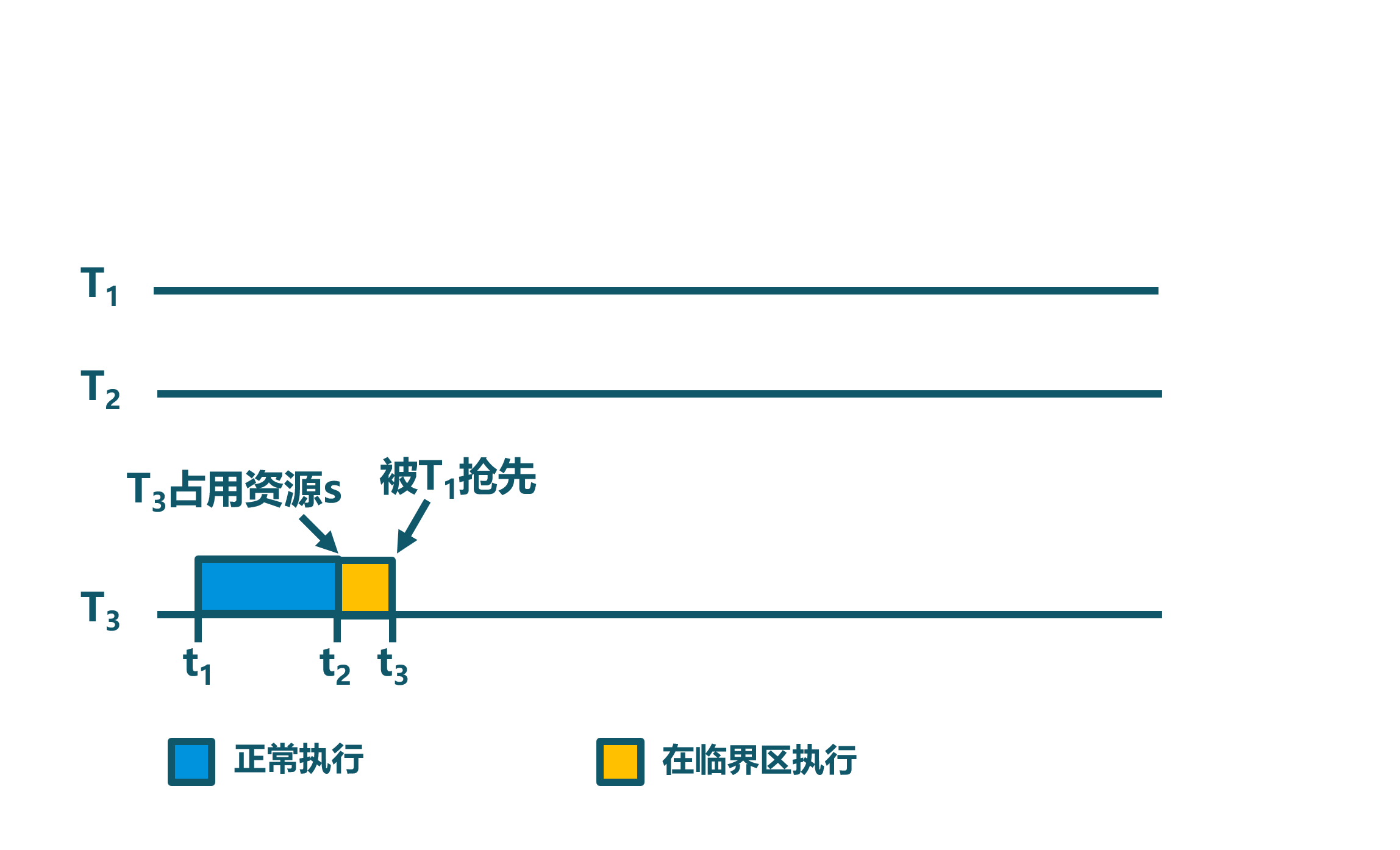
优先级继承(Priority Inheritance)
- 占用资源的低优先级进程继承申请资源的高优先级进程的优先级
- 只在想占有资源的高优先级进程被阻塞时,才提高占有资源的低优先级进程的优先级。注:临界区:互斥访问共享资源的代码片段
优先级继承(Priority Inheritance)
- 占用资源的低优先级进程继承申请资源的高优先级进程的优先级
- 只在想占有资源的高优先级进程被阻塞时,才提高占有资源的低优先级进程的优先级。注:临界区:互斥访问共享资源的代码片段
优先级继承(Priority Inheritance)
- 占用资源的低优先级进程继承申请资源的高优先级进程的优先级
- 只在想占有资源的高优先级进程被阻塞时,才提高占有资源的低优先级进程的优先级。注:临界区:互斥访问共享资源的代码片段
优先级继承(Priority Inheritance)
- 占用资源的低优先级进程继承申请资源的高优先级进程的优先级
- 只在想占有资源的高优先级进程被阻塞时,才提高占有资源的低优先级进程的优先级。注:临界区:互斥访问共享资源的代码片段
优先级继承(Priority Inheritance)
- 占用资源的低优先级进程继承申请资源的高优先级进程的优先级
- 只在想占有资源的高优先级进程被阻塞时,才提高占有资源的低优先级进程的优先级。注:临界区:互斥访问共享资源的代码片段
优先级天花板协议(priority ceiling protocol)
- 占用资源进程的优先级与所有可能申请该资源进程的最高优先级相同
- 不管是否发生等待,都提升占用资源进程的优先级
- 优先级高于系统中所有被锁定的资源的优先级上限,任务执行临界区时就不会被阻塞
小结
- 实时操作系统
- 实时操作系统的定义、实时任务
- 实时调度
- 速率单调调度算法、最早截止时间优先算法、最低松弛度优先算法
- 优先级反置
- 优先级继承、优先级天花板协议